

A Tactile ?Sensory Robot? to Determine Object Features




Engineers at Northwestern University have developed the first array of artificial whiskers that can sweep over an object to render a three-dimensional mapping of its shape. They have also developed a similar set of whiskers that can measure the velocity profile of a fluid flowing past the array. Graduate student Joe Solomon and Assistant Professor Mitra Hartmann constructed the arrays in attempt to mimic the functionality of mammalian whiskers. Solomon and Hartmann call their artificial arrays a ?sensobot,? because the purpose of the robot is not to move, per se, but rather to acquire sensory information about the environment.
By Joseph H. Solomon1 and Mitra J. Hartmann1,2
Departments of 1Mechanical Engineering, 2Biomedical Engineering
Northwestern University, Evanston, IL, 60202, USA
 The idea of artificial whiskers is not itself new. Work on the AMOUSE project (ETH, Zurich, Switzerland), has focused on developing robotic arrays of whiskers that can determine surface texture. Work on the Whiskerbot project (Sheffield, England), has focused on using whiskers for navigation and spatial mapping tasks. Other research teams in the US, Japan, and Australia have constructed whiskers that extract some aspects of object shape, but have been limited by bulky sensors and complex movement strategies, making the transition to multi-whisker arrays problematic. The Northwestern researchers looked to the rat vibrissal (whisker) system as an inspiration to overcome these obstacles.
The idea of artificial whiskers is not itself new. Work on the AMOUSE project (ETH, Zurich, Switzerland), has focused on developing robotic arrays of whiskers that can determine surface texture. Work on the Whiskerbot project (Sheffield, England), has focused on using whiskers for navigation and spatial mapping tasks. Other research teams in the US, Japan, and Australia have constructed whiskers that extract some aspects of object shape, but have been limited by bulky sensors and complex movement strategies, making the transition to multi-whisker arrays problematic. The Northwestern researchers looked to the rat vibrissal (whisker) system as an inspiration to overcome these obstacles.
Rats have approximately thirty whiskers on each side of their face, each of which is exquisitely sensitive to tactile information. Rats move their whiskers back and forth over objects between five and twenty times a second in order to determine object size, shape, orientation and texture. Because there are no sensors along the length of the whisker (which is a hair-like structure), all information must be collected at the base. The basic premise of the Northwestern work was to keep the artificial whisker array as simple as possible, while retaining the fundamental sensing strategies employed by the rat and using firmly-grounded principles of engineering.
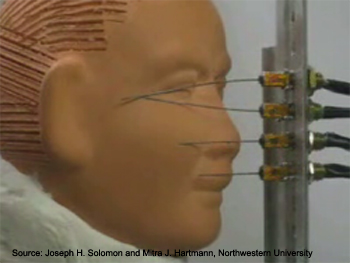
The result is an unimposing array of four straight spring-steel whiskers, vertically aligned and actuated by a single motor. The sensor at each whiskers base measures bending moment often called torque to estimate how much the whisker has bent and at what angle. To make sense of this information, the whiskers are modeled as rotating beams, thus allowing the use of equations from classical elasticity theory. The system works by estimating the angle and radial distance at which each whisker touched the object. Because each whiskers height is fixed, this amounts to sensing the point of contact for each whisker in three-dimensional space. Building up multiple contact points over multiple whisks leads to three-dimensional feature extraction. The ability to sense vertical slip of the whiskers was an important component of the research, as it permits sweeping in any direction along the object. As seen in the associated video, the whiskers slip up and down when they hit differently angled surfaces of the object.
The Northwestern researchers also tested another array design, this one with the goal of modeling the sensing capabilities of harbor seals. Seals are renowned for their ability to follow the wakes of their prey, capable of detecting and tracking the wake caused by a fish up to minutes after it has swum by. The whiskers of the seal-inspired sensobot are thicker to allow greater sensitivity to fluid flow, and remain fixed while sensing fluid flow velocity. Again, by measuring the bending moment at the base of each whisker, the velocity profile of a fluid can be accurately estimated. Tracking a wake may be as simple as keeping a given flow pattern centered along the array, an idea that the researchers hope to test in future experiments.
Solomon and Hartmann expect that the whiskers could have a variety of applications, ranging from use on small and efficient robots capable of exploring dark, confined environments, to use on autonomous rovers to determine times of wheel slip and locking. The researchers are particularly interested in using these whiskers as a research tool in neuroscience. The whiskers will help to predict the signals that may exist in the primary sensory neurons of animals that use their whiskers for exploration. In addition, the whisker sensobots will help elucidate the benefits and drawbacks of different whisking and exploratory strategies, and aid as a bottom-up approach towards studying neural coding. The researchers are currently creating a full three-dimensional model of the rats head and whiskers to quantify the spatiotemporal variations in moment across the whisker array s the rat explores different types of objects.
Solomon J.H., Hartmann M.,J., Nature, 443, 525 (5 October 2006)
 Read more
Read more

It is a very interesting article.